As we know that the angle from 'pitch, roll, yaw' is measured from first reference frame.
 we noticed from the last couple that it is rotate 90 around y axis of the first frame ( not -90 degree around z axis in the secound frame )
we noticed from the last couple that it is rotate 90 around y axis of the first frame ( not -90 degree around z axis in the secound frame )
Even though, we have subsequent frame.
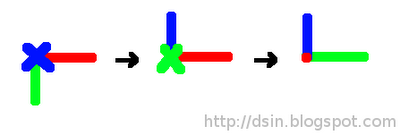
For example, if we rotate 90 degree around x axis, then rotate 90 degree around y axis.
 we noticed from the last couple that it is rotate 90 around y axis of the first frame ( not -90 degree around z axis in the secound frame )
we noticed from the last couple that it is rotate 90 around y axis of the first frame ( not -90 degree around z axis in the secound frame )We can use rotation formula, like R = RyRx
However, in some case, if we want to use the the rotated frame as a reference frame, ( for example, -90 degree around z axis in the second frame, in this case ), we can do that
and the formula to convert from rotated frame to the first reference frame is
BRB-1 or BRBT ( because the rotation matrix is orthonormal )
for example, from the example above
we rotate 90 degree around x axis and then 90 degree around y axis, so
R = RyRx
octave:1> [0 0 1;0 1 0;-1 0 0]*[1 0 0;0 0 -1;0 1 0]if we want to rotate 90 around x axis and then -90 degree around z axis, our R will be
ans =
0 1 0
0 0 -1
-1 0 0
R = (RxRx,zRx-1)Rx
octave:2> ([1 0 0;0 0 -1;0 1 0]*[0 1 0;-1 0 0; 0 0 1]*[1 0 0;0 0 -1;0 1 0]')*[1 0 0;0 0 -1;0 1 0]
ans =
0 1 0
0 0 -1
-1 0 0
more info : wiki
ความคิดเห็น